
Самостоятельное изготовление регулятора оборотов электродвигателя. Регулятор оборотов коллекторного двигателя: устройство и изготовление своими руками Электронная схема управления оборотами электродвигателя 12в
Во многих электронных схемах используются системы активного охлаждения с вентиляторами. Чаще всего их моторы управляются микроконтроллером или другой специализированной микросхемой, а скорость вращения регулируется с помощью ШИМ. Такое решение характеризуется не слишком хорошей плавностью работы, может привести к нестабильной работе вентилятора, а кроме того, создает много помех.
Для потребностей высококачественной аудиотехники разработан аналоговый регулятор оборотов вентилятора. Схема пригодится при строительстве усилителей НЧ с активной системой охлаждения и позволяет выполнить плавную регулировку оборотов вентиляторов в зависимости от температуры. Производительность и мощность зависит в основном от выходного транзистора, тесты проводились с выходными токами до 2 А, что позволяет подключить даже несколько больших вентиляторов на 12 В. Естественно можно применить это устройство и для управления обычными моторами постоянного тока, при необходимости повысив питающее напряжение. Хотя для совсем уже мощных двигателей придётся задействовать системы плавного пуска tehprivod.su/katalog/ustroystva-plavnogo-puska
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа - компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k). Конденсатор C10 (22pF) улучшает стабильность усилителя, а R12 (10k) подтягивает выход компаратора к плюсу питания.

На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода - AR2 (TB2), а разъем питания - AR1 (TB2).

Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения - порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.

В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Сборка регулятора
Монтаж следует начинать с установки двух перемычек, затем должны быть установлены все резисторы и мелкие керамические конденсаторы.


В большинстве случаев оба эти элемента будут установлены снизу платы на ножках, изогнутых под углом 90 градусов. Такая укладка позволит их прикрутить непосредственно к радиатору (обязательно использовать изоляционные прокладки).
Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
На основе мощного симистора BT138-600, можно собрать схему регулятора скорости вращения двигателя переменного тока. Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Например, когда мотор сверлильного станка тормозит из-за повышенного сопротивления металла, ЭДС двигателя также уменьшается. Это приводит к увеличению напряжения в R2-P1 и C3 вызывая более продолжительное открывание симистора, и скорость соответственно увеличивается.

Регулятор для двигателя постоянного тока
Наиболее простой и популярный метод регулировки скорости вращения электродвигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM ). При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться - так меняется и скорость (мощность).

Для генерации ШИМ сигнала можно взять схему на основе микросхемы NE555. Самая простая схема регулятора оборотов двигателя постоянного тока показана на рисунке:

Здесь VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1. Частоту ШИМ сигнала можно рассчитать по формуле:
F = 1.44/(R1*C1) , [Гц]
Где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 290 Гц.
Стоит отметить, что даже современные устройства , в том числе и высокой мощности управления, используют в своей основе именно такие схемы. Естественно с использованием более мощных элементов, выдерживающих большие токи.
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания . Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.
Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).

Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на . Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.

Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:

Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.

Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет "воспринимать" среднее значение подводимой к нему энергии.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
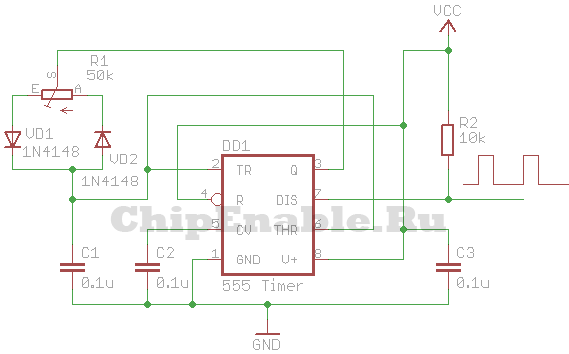
Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
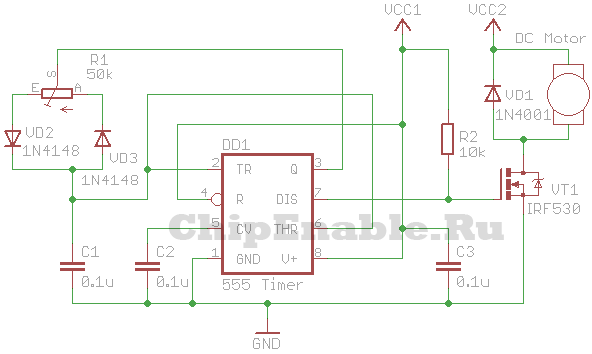
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателяСамый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
 Фото – регулятор оборотов двигателя постоянного тока
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
 Фото – схема регулятора для коллекторного двигателя
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
 Фото – синусоида нормальной работы электродвигателя
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
 Фото – схема регулятора для бесколлекторных двигателей
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
 Фото – схема регулятора оборотов своими руками
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:

Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Похожие статьи
 Как создать Sitemap XML для "Яндекса" и Google: пошаговая инструкция
Как создать Sitemap XML для "Яндекса" и Google: пошаговая инструкция
 Обзор компьютерных колонок F&D R244 Технические характеристики АС F&D R224
Обзор компьютерных колонок F&D R244 Технические характеристики АС F&D R224
 Как правильно установить приложение Adobe Flash Player?
Как правильно установить приложение Adobe Flash Player?
 Способы удаления разделов жесткого диска
Способы удаления разделов жесткого диска
 Не включается телефон Huawei — как устранить неполадки?
Не включается телефон Huawei — как устранить неполадки?
 Классификация, морфология и биология вирусов Общая вирусология презентация
Классификация, морфология и биология вирусов Общая вирусология презентация
 Тарифы МТС MAXI Smart и MAXI Top
Тарифы МТС MAXI Smart и MAXI Top Дополнительный мигающий стоп сигнал Что представляет собой устройство
Дополнительный мигающий стоп сигнал Что представляет собой устройство Как зарегистрироваться в Facebook — пошаговый алгоритм действий Зарегистрируйся и играй facebook google вконтакте
Как зарегистрироваться в Facebook — пошаговый алгоритм действий Зарегистрируйся и играй facebook google вконтакте Бесплатный онлайн переводчик сохраняет структуру вашего документа (Word, PDF, Excel, Powerpoint, OpenOffice, text)
Бесплатный онлайн переводчик сохраняет структуру вашего документа (Word, PDF, Excel, Powerpoint, OpenOffice, text)